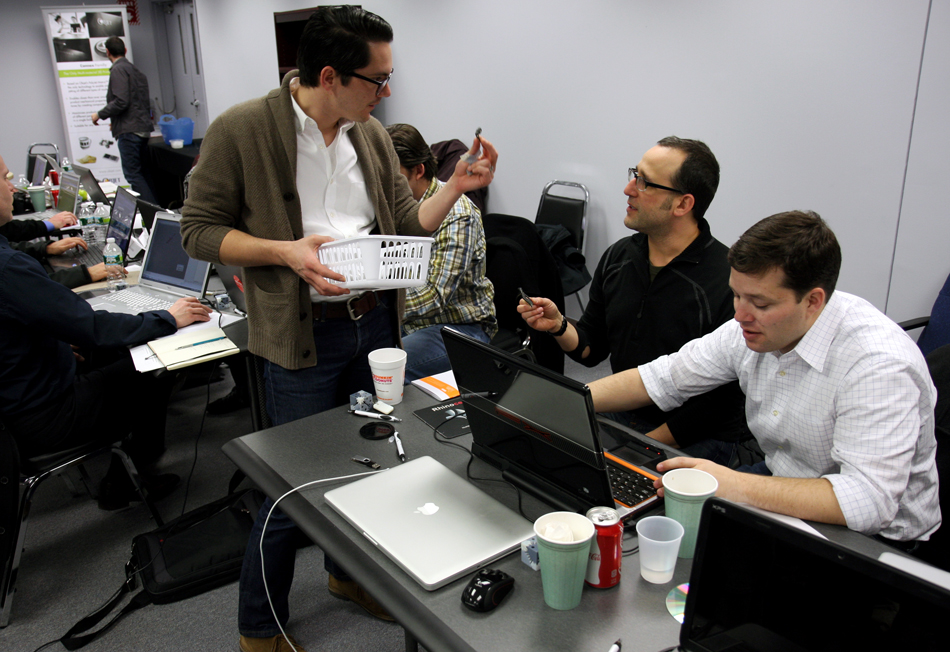
BILLERICA, MA | OBJET HEADQUARTERS | SYNTHETIC LANDSCAPES WORKSHOP | FEB 29-MAR 1, 2012
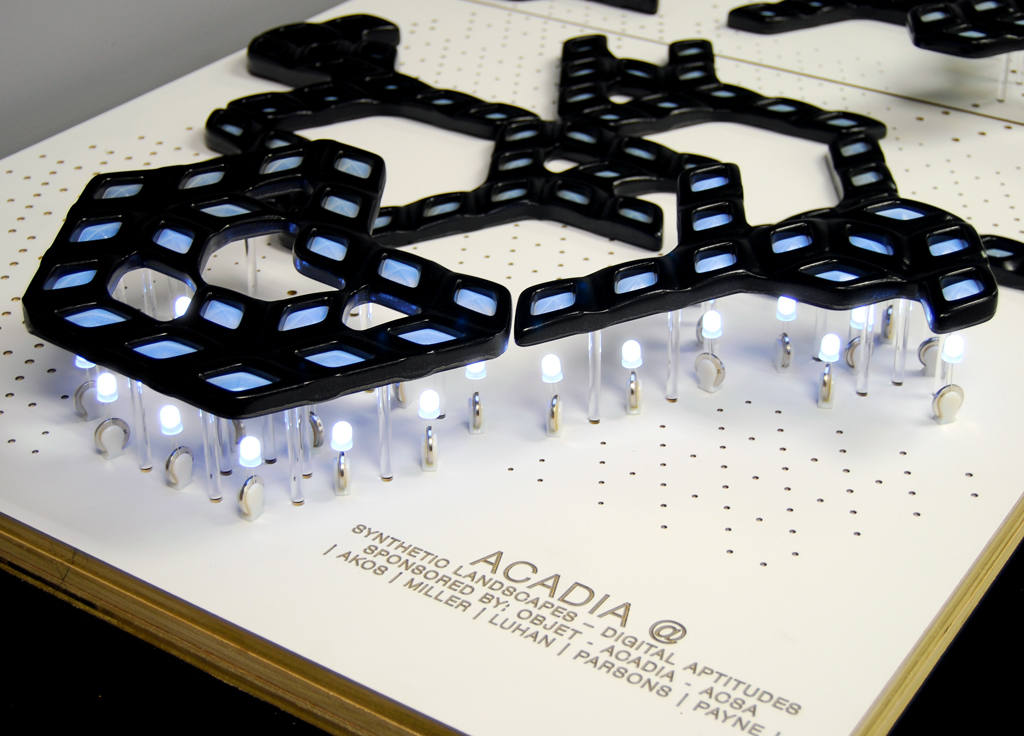
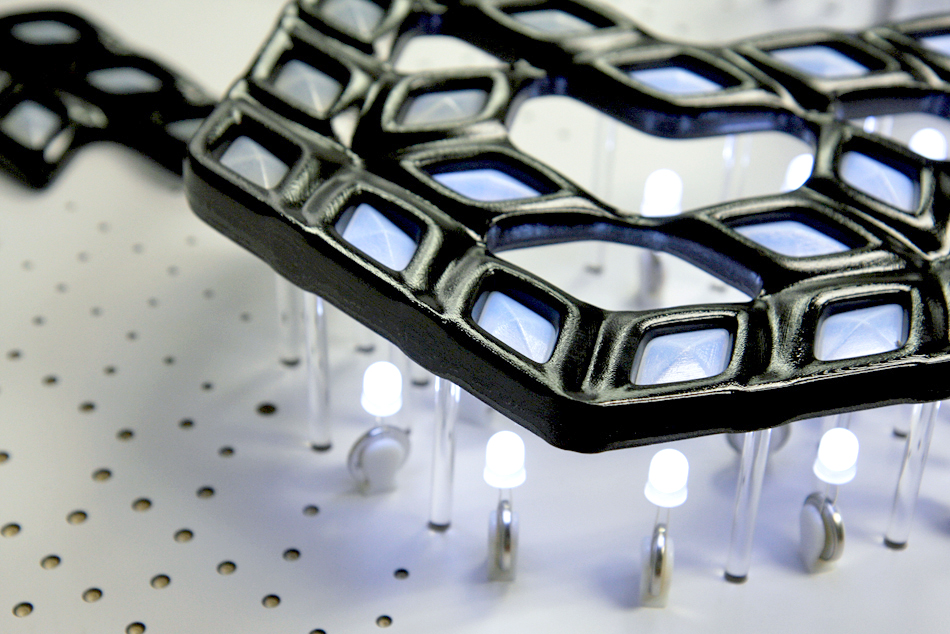
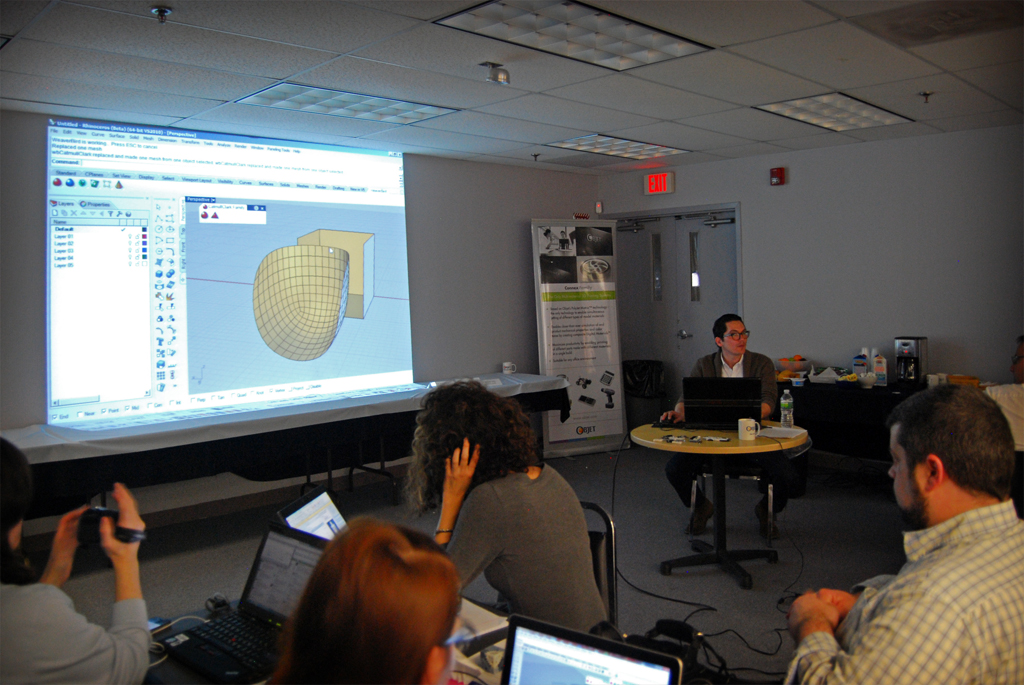
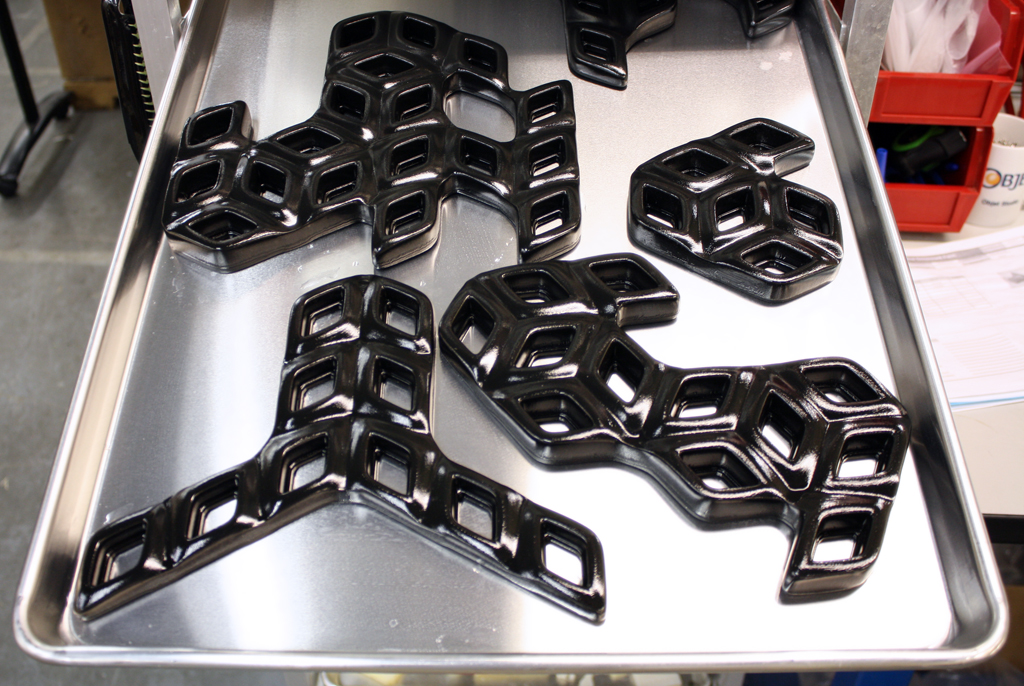
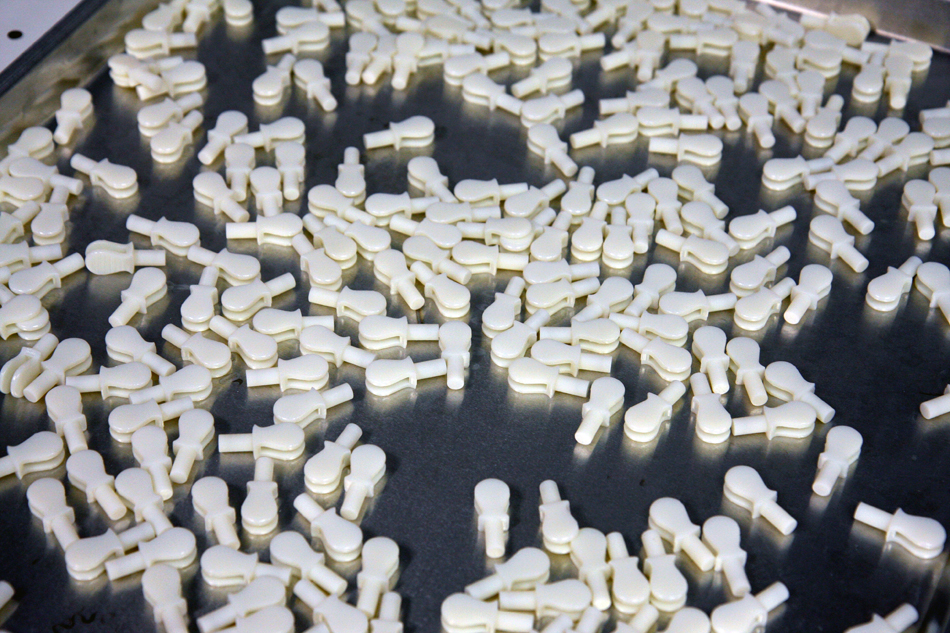
This intensive two-day workshop at the Objet Headquarters in Billerica, MA will provide workshop participants the opportunity to work with a team of expert consultants, to hone their digital and prototyping skills, to experiment with a range of digital production tools, and to design and fabricate a unique set of components that negotiate a range of material gradients across a field condition. Through iteration, participants will generate and fabricate components (parts) to form a larger network (whole). The goal of this workshop is to combine technological precision (Objet – Connex) and pedagogical creativity (curriculum) to explicate the creative potentials of both the various forms of software and materials-based investigations that could be replicated in curriculum.
The results of the workshop will be showcased at the Boston Park Plaza, formally presented during a Special Focus Session on Friday, 02 March during the 100th ACSA Annual Meeting, and be part of a traveling exhibition that will circulate North America in 2012.
Consultants:
*Gregory Luhan (ACSA/ACADIA organizer)
ACADIA: *Gil Akos, *Kyle Miller, *Ronnie Parsons, *Andy Payne
* Designates Workshop Leaders
ACADIA @ Digital Appitudes | Synthetic Landscapes
Special Focus Session to discuss pedagogical implications of the workshop. Panelists include team leaders, workshop attendees, and Piet Meijs.
Using the Digital Aptitudes workshop hosted by Objet as a critical point of departure, this moderated session will focus on linking the pedagogical to the technological. Short presentations by panelists Kyle Miller, Andy Payne, Gil Akos, Ronnie Parsons, Piet Meijs, and Gregory Luhan will frame the conceptual underpinnings of workshop as part of an embedded, participatory, and replicable art-to-part curriculum developed with Neri Oxman. The presenter’s own research into areas including flexible form manufacturing, site malleable construction, building performance, and blended materials research will align the concept-to-completion workshop outcomes as logical extensions of an otherwise technologically-driven and application-based synthetic ecology.
For more information about this workshop and Registration information visit: